12月22日,星辰数据联盟发布会现场,中汽创智与清华大学共同发布了“4D成像毫米波雷达数据集Dual Radar”和“路端协同感知公开数据集RCooper”两个公开数据集。这两个数据集的发布,让扎根于真实世界数据的学术研究在产业的土地上开花结果,为协同感知领域提供了新的数据“燃料”。
中汽创智一直以来都非常重视数据资产的建设和积累,并通过产学合作积极探索前瞻、领先的技术方案。与清华大学AIR研究院共同推出的MultiView路端感知数据集,不仅为多模态多视角路端感知技术的发展提供了坚实的数据基础,同时也有助于推动中国式车路协同技术方案的深入探索。
此外,中汽创智与清华大学猛狮团队在BEV多传感器融合算法架构下,共同推出了4D毫米波雷达数据集,这一成果为智能驾驶量产方案的传感器多样性探索提供了数据支撑。

中汽创智感知算法首席专家袁金伟发布中汽创智与清华大学合作”公开数据集”
4D成像毫米波雷达数据集Dual Radar

清华大学猛狮智能车团队负责人,中国人工智能学会副秘书长、理事 张新钰发布“CAIC&清华--4D成像毫米波雷达数据集Dual Radar”
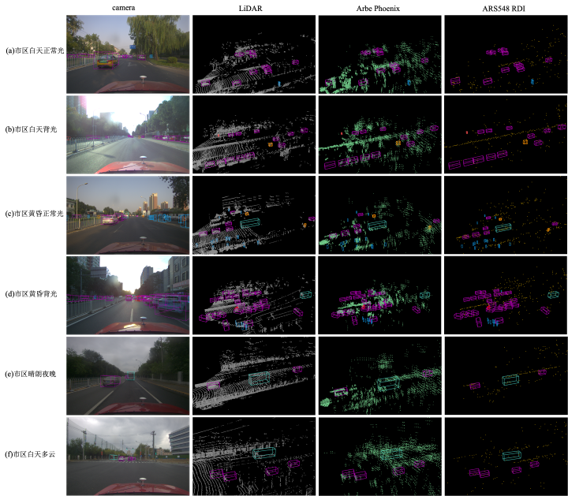
中汽创智(CAIC)与清华大学猛狮智能车团队合作发布首个面向中国城市复杂气候环境的自动驾驶4D成像毫米波雷达融合感知数据集Dual Radar,以及初步的算法验证结果,为复杂气候环境下的自动驾驶感知算法研究提供了新的测试基准。
当前以相机和激光雷达为主的算法无法有效应对复杂气候环境下的挑战,而4D成像毫米波雷达具有全天时全天候的工作能力,是提升感知可靠性的有效途径。然而,目前尚缺乏针对中国城市复杂气候条件下4D成像毫米波雷达感知数据集。清华大学猛狮智能车团队联合中汽创智开展关键技术攻关和数据采集,发布了国际首个面向中国城市复杂气候环境的自动驾驶4D成像毫米波雷达数据集Dual Radar并免费开源,为复杂气候下的4D毫米波感知算法研究提供了一个新的测试基准。该数据集首次同时采集两种主流类型的4D雷达,可用于探索在不同雷达点云密度和噪声水平下的感知算法。
路端协同感知公开数据集RCooper

清华大学智能产业研究院产业合作负责人 袁基睿发布“CAIC&清华--路端协同感知公开数据集RCooper”
通过路端多视角多传感器协同感知实现区域级全时空交通场景理解,有助于实现纯路侧高等级自动驾驶,推进智能化道路建设。然而,当前路端研究主要聚焦在单视角感知优化。
为了促进学术界与产业界共同打造数据驱动的路端协同感知,中汽创智(CAIC)与清华大学智能产业研究院(AIR)合作,发布了全球首个真实世界大规模路端协同感知数据集RCooper,旨在共同探索路端协同感知的实际应用模式。该数据集涵盖了路口和路段两种典型路端场景,包含激光雷达点云和视觉图像两种典型模态数据,可用于各类下游感知任务的研究,如路端协同3D检测和路端协同3D跟踪。

申请链接
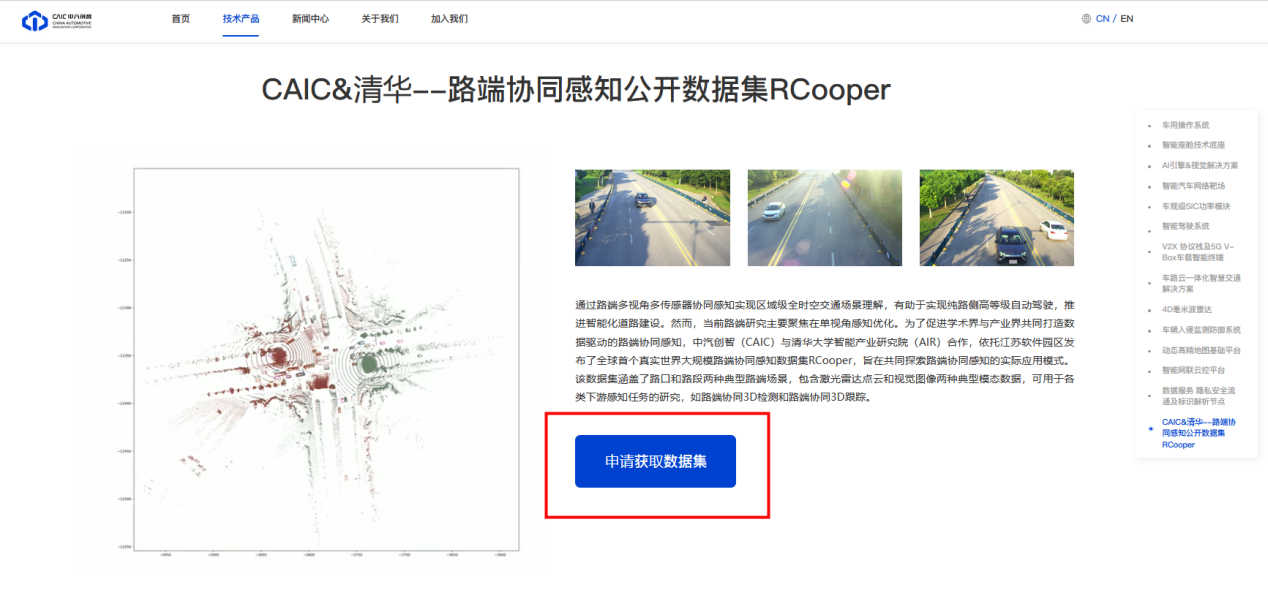
申请路径:登录“中汽创智官网”https://www.t3caic.com/,点击“技术产品”-“擎臻”智能网联版块 - 申请获取数据集
 江苏省南京市江宁区秣陵街道胜利路88号中汽创智大厦
江苏省南京市江宁区秣陵街道胜利路88号中汽创智大厦
 media@t3caic.com (媒体联系)
media@t3caic.com (媒体联系) bd@t3caic.com (商务合作)
bd@t3caic.com (商务合作) hr@t3caic.com(加入我们)
hr@t3caic.com(加入我们)